
 Team brings home $4,000 prize
Team brings home $4,000 prize
KINGSTON, R.I. – July 24, 2007 — A team of University of Rhode Island students and their coach won $4,000 for placing second in the 10th annual International Autonomous Underwater Vehicle Competition, sponsored by the U.S. Office of Naval Research and the Association for Unmanned Vehicle Systems International.
The students competed July 13 through 15 against 27 other teams – the largest field in the history of the competition – from the United States, Canada, India and Japan at the Space and Naval Warfare Systems Center in San Diego. The University of Florida placed first, while Ecole de Technologie Superieure of Canada placed third and Cornell University placed fourth. URI won the competition in 2000, the first year it entered.
The event challenges student engineers to build a miniature robotic submarine that can self-navigate and independently perform realistic missions. This year’s mission involved finding the underwater starting gate, docking at a buoy, following a pipeline, dropping a marker into a bin, detecting an acoustic beacon, and finding and retrieving a “treasure.” Once launched, the vehicles had to complete the mission without any external guidance or control.
“Half of the challenge is designing, building and programming the vehicle and preparing for the competition,” explained team captain Michael Palmieri, a URI graduate student from Falmouth, Mass. “The other half happens at the competition itself, adjusting to the circumstances at the venue and fixing things that might go wrong. Every team had things to fix when they got there. You just hope it’s not catastrophic.”
Palmeiri and teammates Georges Dossot of Farmington, Conn., Matthew Jewell of Old Lyme, Conn., and Jonathan Byron of Davis, Cal., said that the biggest obstacle was the poor visibility in the pool. Their vehicle used two video camera systems to complete its mission, but the cameras had difficulty seeing through the murky water.
“The poor visibility required us to make a lot of last minute adjustments,” said Jewell.
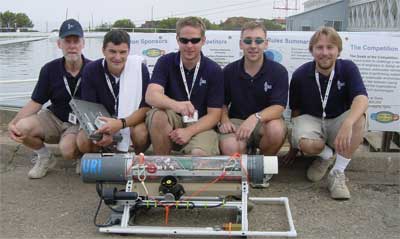
In addition to cameras, the URI vehicle – a 3-foot long tube sitting on a triangular base and dubbed RAM-Boat 8 – was equipped with a sonar system, four thrusters for propulsion, two Netburner microcontrollers, eight battery packs, and a grappling hook to pick up the treasure.
“Our approach was very different from most of the other teams,” explained Dossot. “The other teams used very expensive electronics that were over-engineered. For many of the teams, that was the source of their failure.”
The seven teams that made it to the final round of competition were very closely matched, though the URI students said that the team from Florida was the clear winner.
“In the finals, our turn came toward the end, so we had the advantage of watching the other teams and knowing exactly what we needed to achieve to win,” Byron said.
“Our vehicle was also programmed not to spend too much time on any one task,” said Dossot. “Several of the other vehicles didn’t have time to complete the course because they wasted so much time on a task their vehicle couldn’t do.”
Added Palmieri, “We were also able to make adjustments really quickly when we needed to.”
In the end, the competition was a tremendous learning experience that the URI students said was both fun and useful to their future career paths.
According to coach Robert Tyce, a URI professor of ocean engineering, “the team worked hard to dramatically upgrade last year’s fourth place robot with new wireless internet computers and cameras plus new custom mission software. But with 28 teams competing this year we were only 12th after the first round of judging and had lots of difficulties communicating with the robot. To the team’s credit, they then worked day and night to revise their robot’s programming and achieved spectacular runs on the third day when it really counted, putting URI in third place for the finals. We managed to pull ahead of the second place team in the finals, but the University of Florida team was unbeatable this year.”
In addition to the underwater competition, the contest included preparation of a journal paper and website (oce.uri.edu/~auv) describing how the vehicle was designed, and a visual display and inspection of the vehicle for technical merit, design, safety and craftsmanship.
In addition to Palmieri, Dossot, Jewell and Byron – all of whom were on hand in San Diego for the competition – the URI team included Darren Flynn of Providence, R.I., A.J. Fournier of East Hartford, Conn., Daniel Maher of Eastchester, N.Y., Andrew Valainis of Warwick, R.I., Charles Tyce of Coventry, R.I., and Gregor Langer of Braunschweig, Germany. The team was coached by Tyce and advised by URI Professor James Miller and industry representative Henry Sharpe III.
The URI team was sponsored by Raytheon Co., Harris Acoustic Products, Subconn, SeaBotix, BBN Technologies, and the URI Partnership for Ocean Instrumentation.
Pictured above
The URI underwater vehicle team, (l-r) Coach Robert Tyce and students Michael Palmieri, Matthew Jewell, Georges Dossot and Jonathan Byron, pose with their vehicle, RamBoat-8.